





User Case Study:
Designing an Industrial Pick-and-Place Robot







Challenge
A leading provider of packaging machines was experiencing repeated motor failures with their pick-and-place robots, facing substantial replacement costs on a regular basis.
Solution
The company chose Maplesoft to develop a high-fidelity parameterized model of the robot. Using MapleSim, the company simulated the robot’s operation and used Maple to understand the exact cause of failure in hopes of finding a cost-effective solution.
Result
The results from MapleSim showed the company a solution they were unaware of - instead of replacing motors in every robot, they could modify the robot motion profiles to reduce the moments of greatest motor torque. The company was able to essentially apply a software update to what was previously expected to be costly, on-site hardware replacements for larger motors. Going forward, they are using their MapleSim models for other robots, minimizing the high costs of over-engineered components and unexpected on-site repairs.
Industrial automation is on the rise, with machines performing more complicated tasks every day. Designing these complex industrial machines is a challenging process. Engineers need to ensure that the machine they design meets many different performance objectives for productivity, workspace, maneuverability, payload, and so on. At the same time, they also need to develop a design that will minimize both production and maintenance costs, such as using the smallest possible motors and the shortest links for robot arms, and minimizing loading to reduce the wear and tear that leads to expensive repairs and downtime. In light of so many complexities, organizations will over-engineer products, investing in more costly components to reduce unforeseen failures. Others will try to minimize costs, but are more likely to face expensive on-site repairs when unexpected failures occur. System-level modeling offers a third option, providing analysis and deep insight into product performance long before physical prototypes.
A leading provider of packaging machines approached the Maplesoft Engineering Solutions team looking to understand why they were experiencing reoccurring motor failures in their pick-and-place robots deployed in the field. They turned to Maplesoft to help them answer questions about the design of their product, including many questions that could prove beneficial for all of their future robot designs:
The Maplesoft Engineering Solutions team applied a parametric system modeling approach to answer these questions. They used MapleSim to develop a high-fidelity parameterized model of the company’s pick-and-place robots. Then they used the advanced computation capabilities of Maple to develop analysis tools that examine the operation of the system and its dynamic behavior with different sets of parameter values. These analysis tools, together with the high-fidelity model, provided the company with the insight required to determine how to prevent their motor failures without any new additional hardware. They were able to adjust the robot’s motion profile with updated software, eliminating moments when the motors were experiencing damaging levels of torque. What had previously required regular motor replacements was reduced to a simple software update, saving the company substantial amounts of money on their entire line of robots. Further to this, Maplesoft provided them with a toolset they could easily configure for use in the design of similar products.
Model Development using MapleSim
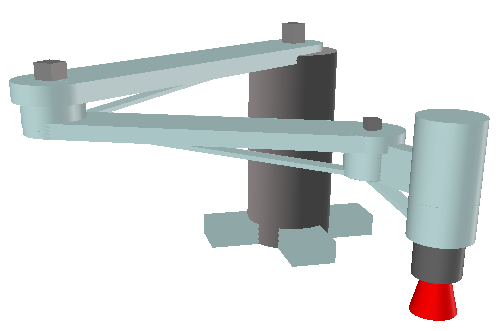
An example of a typical pick-and-place robot is shown in Figure 1. The robot model is mounted on a reference base, to which three links that form the robot arm are connected. The links are actuated by three servo motors, which provide the rotational motion and control with three degrees of freedom. The end effector consists of a translational component attached to the third link, allowing for the desired pick-and-place action.
This case study presents just one example of innovation in the industrial automation and packaging machinery sectors. As automated robot requirements become more complex, this company realized the huge role that system-level modeling can play in driving innovation. What started as the desire to fix a simple problem has radically transformed their design process, shortening design cycles and minimizing unnecessary costs every step of the way.